SAVO = systém automatické výměny obrboků
pomocí manipulátorů a robotů (u rotačních součástí na soustruhu)
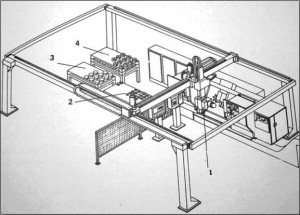
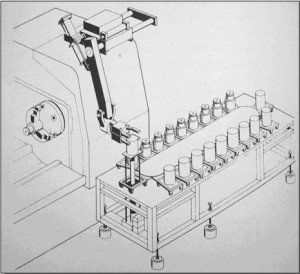
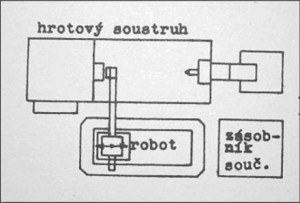
Rozdělení podle konstrukce: A) Systém s portálovým manipulátorem - Transport obrobků probíjá nad strojem - Vkládání a vyjímání obrobků probíhá ze zhora - Zepředu je volný přístup ke stroji B) Systém s manipulátorem vestavěným přímo do stroje - Nejlevnější řešení (pomocí jednoúčelového zařízení) C) Systém s univerzálním robotem vedle stroje - Vysoká pořizovací cena - Velká půdorysná plocha zastavěná robotem - Lze využít pro obsluhu více strjůTyto zařízení musí při práci spolupracovat s řídícím systémem, používá se pro rotační součásti malé a střední velikosti.